|
Version 1.1 Copyright ©2017 by Paul Niquette. All rights reserved. |
|||||||||||||||||||||
|
A typical Trampoline
Deorbiting
Mission Sequence will be used to summarize
the
proposal.
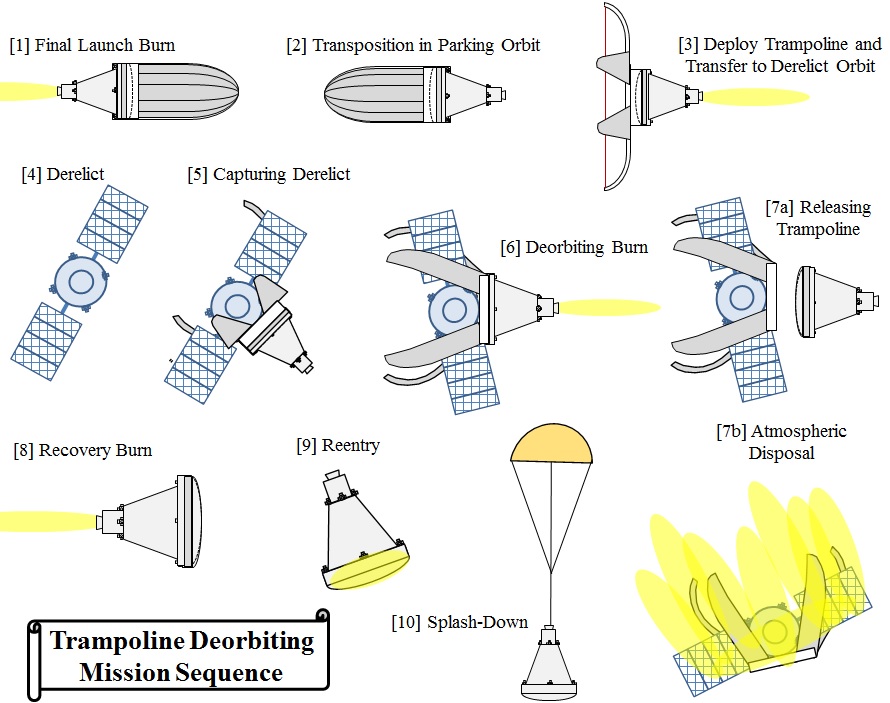 [1] Final Launch Burn The spacecraft is delivered to the parking orbit by the main engine acting in prograde. 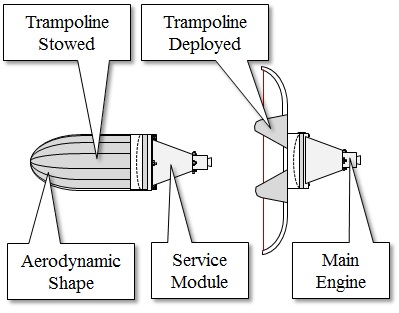 [2] Transposition in Parking
Orbit [2] Transposition in Parking
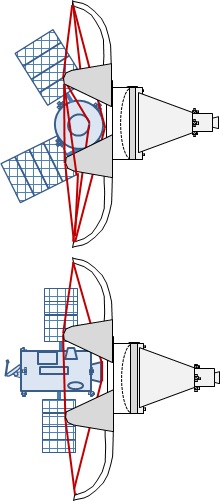
OrbitThis maneuver is required to enable the main engine to act in the retrograde direction.[3] Deploy Trampoline and Transfer to Derelict Orbit The trampoline is stowed within the aerodynamic shape of the launch configuration. See details. In its deployed configuration, bungies are stretched across the trampoline above the platform to absorb contact shocks. 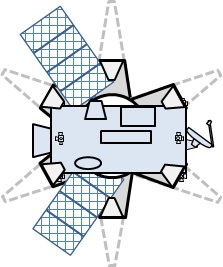 [4] Derelict [4] Derelict
Depicted in the sketch above is a typical defunct satellite with cylindrical body and solar panels. Here is a 'top view' of its capture.[5] Capture Derelict The trampoline arms are spring-loaded to retract against the derelict. 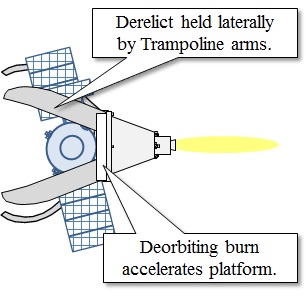 [6] Deorbiting Burn [6] Deorbiting BurnHere we see the most distinctive feature of the Trampoline Deorbiting System: The deorbiting burn acts in compression against the derelict. The capturing mechanism is not required to grasp the derelict firmly to support extreme tensions during the deorbiting burn. The thrust can thus be regulated to prevent collisions with on-orbit satellites during delivery to the disposal orbit.[7a] Releasing Trampoline [7b] Atmospheric Disposal The manufacturing cost for the Trampoline Deorbiting System is dominated by the service module, which is designed to be reusable. Each derelict is delivered to the disposal orbit along with the trampoline module, which is designed to be 'sacrificial'. 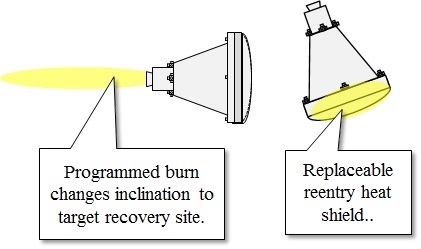 [8] Recovery
Burn [8] Recovery
BurnThe main engine of the service module can be used to change its orbit to target the recovery zone.[9] Reentry The atmospheric reentry is managed to limit the ablation of the heat shield and thus assure re-usablity of the service module.[10] Splash-Down The service module needs to be equipped with a flotation collar for recovery at sea along with lighting and robust locator beacon for all-weather retrieval. Design Features of the Trampoline Deorbiting System Push not Pull By far, the most distinctive feature of the Trampoline Deorbiting System is how the design gives full recognition to a fundamental reality in space technology -- that rocketry can provide only push not pull. Based on Internet searches, one can find any number of proposed debris capturing mechanisms that require the subsequent towing of a derelict on the end of a cable into an atmospheric drag orbit 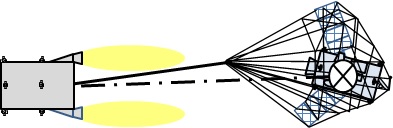 Here
is a sketch of a derelict captured in a butterfly-net
and being towed during a deorbiting burn. Notice
that a single, main engine cannot be incorporated in the
design, since it would direct its flames along the
center-line. Instead multiple, laterally-displaced
thrusters must be accommodated. Here
is a sketch of a derelict captured in a butterfly-net
and being towed during a deorbiting burn. Notice
that a single, main engine cannot be incorporated in the
design, since it would direct its flames along the
center-line. Instead multiple, laterally-displaced
thrusters must be accommodated. Moreover, during retrograde burns, the captured derelict will spontaneously get drawn to the side so that its center of mass will align with the thrust vector. That can bring the towing cable into conflict with the blast from a thruster. By the way, since deorbiting burns are not necessarily continuous, the cable will go slack from time to time, and any induced lateral movements can permit the derelict to swing undamped in deleterious ways. Keep in mind that the derelict is apt to be more massive than the spacecraft used for its deorbiting, which imposes considerable forces on the cable and on the capturing mechanism -- tensile forces that are more difficult to manage than the compression forces against the platform of the Trampoline Deorbiting System. For the proposed system, misalignments can be readily compensated by conventional thrust vectoring of the single main engine on the service module. Tumbling Derelicts
As noted in step [3] of
the
mission sequence “In its deployed configuration, bungies
are stretched across the trampoline above the
platform to absorb contact shocks.” Prior to
step [5],
the service module is to be operated in
remote-robot mode, commanded by operators in
central control based on real-time video
information.
Deorbiting
Maneuvers Once the
capture is complete in the derelict orbit, the
ensemble (trampoline with derelict, plus service
module) will need to conduct the most appropriate
deorbiting maneuvers. From a derelict orbit, which is typically circular, a retrograde deorbiting burn that produces a small ∆V will change the orbit of the ensemble to an eccentric ellipse, with its perigee on the opposite side of the earth. The ensemble will then return back up to the firing point, which will be at its apogee, having twice traversed the orbits of working satellites.
Electrical Requirements One does not see solar panels on the service module. Here's why. The duration of a typical mission for the Trampoline Deorbiting System will be less than 24 hours...
That means electrical power for communications and control, for solenoids and motorized operations, including valves and pumps for main-engine functions -- all electrical demands can be readily met by properly sized storage batteries. This feature greatly simplifies the mechanical design of a fully recoverable service module. Details of Trampoline Operations
|
 One of the most
perplexing technical challenges is designing an
active system for capturing a derelict that is
tumbling in space.
One of the most
perplexing technical challenges is designing an
active system for capturing a derelict that is
tumbling in space.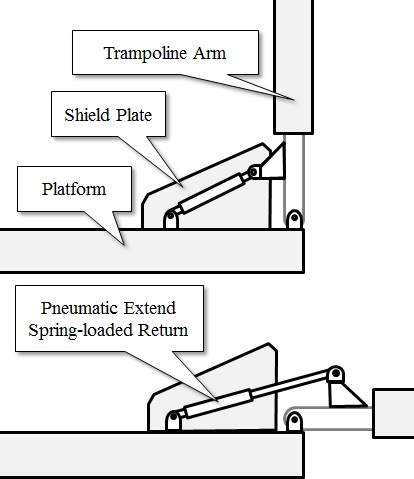 As
part of pre-launch preparations, the trampoline
arms are mechanically retracted by their
spring-loaded returns and latched for stowage
inside the aerodynamic fairings.
As
part of pre-launch preparations, the trampoline
arms are mechanically retracted by their
spring-loaded returns and latched for stowage
inside the aerodynamic fairings.